

模糊和平滑
2010 年 02 月 24 日 | 分类于 学习中用过Photoshop或者GIMP的朋友应该都对高斯模糊这个工具比较熟悉。我虽然对作图不怎么了解,但隐约感觉投影效果中的阴影就是用高斯模糊做成的。下面是一个简单的高斯模糊的示例(图片来源),还有一个真相请看这里:

其中右半部分应用了高斯模糊的效果,看起来就像是在画面上盖了一层毛玻璃。那么这种效果是怎么实现的呢?其实啊,看到高斯这个名号,就不由地让人警觉起来——他的渗透力实在太大了。
在网上找了几篇介绍高斯模糊的文章——维基、博客一、博客二,看着里面的几个公式那叫一个亲切啊,虽然世间“高斯”的含义有很多,但此处的高斯自然就是统计中最熟悉不过的正态分布了。维基中对高斯模糊的解释挺吓人,“图像的高斯模糊过程就是图像与正态分布做卷积”,像我这种数学根基不好的看到这里便肃然起敬,只好通过后面博客中的例子来理解了。
看来看去,终于看到了一些熟悉的东西,原来高斯模糊和平滑技术中的核函数回归是一回事。先看下面这两张图(从The Elements of Statistical Learning中截的):
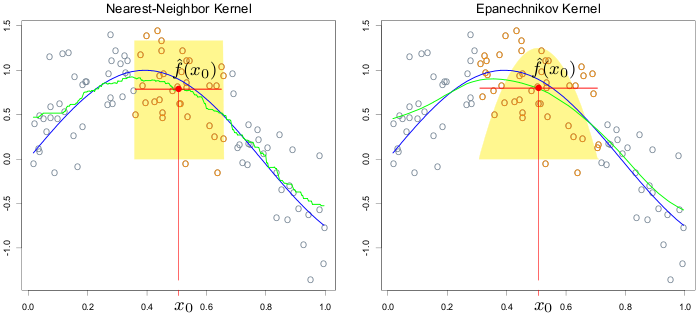
其中散点图代表了y与x之间的对应关系。可以看出,随着x的增大,y的取值会上下起伏,变动比较大;而图中的蓝线非常光滑,同时又体现了散点图的大致走向,因此可以认为蓝线是这堆散点的一种规律性描述。事实上,图中的散点就是在蓝线的基础上加以随机误差而生成的。在大多数的情况下,我们能够获得的信息就是图中的散点,而蓝线则是我们想要得到的规律,于是我们面临的问题就是用这些已知的数据去估计未知的结构。图中的绿线做的就是这件事,左图用的是最近邻法,右图是用的是Epanechnikov核函数法。具体的计算细节在此不多加讨论,但总结起来它们都做了同样一件事:为了估计某个点x0处y的取值y0,先在x0处开一扇窗子,让某些点进入窗子,其它的排除在外;这样一来,窗子内的每个点xi都有其对应的y的取值yi,然后用某种权重将这些yi组合起来,作为y0的估计。举个例子来说,如果要估计x=0.5时y的取值,先构造一扇窗子(0,1),那么只有x取值在这个范围内的点才能进入;假定进入窗子的点有(0.2, 1)(0.4, 0.5)(0.8, 0.2)三个,其权重假定为0.2、0.6和0.2,那么x=0.5时y取值的估计就是0.21+0.60.5+0.2*0.2=0.54。在实际计算的时候,窗子的宽度怎么定,窗内点的权重怎么定,是主要要讨论的内容。上面那幅图左边的最近邻法比较简单,就是对离x0最近的k个点取算术平均,而右边的则相对复杂些,如果感兴趣的话可以看看那本书的第193页。
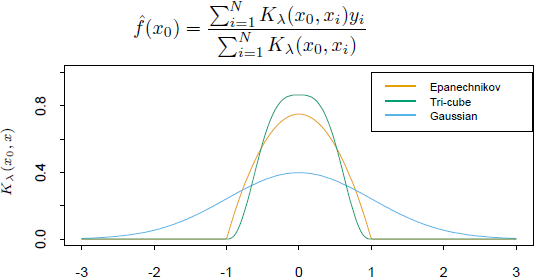
回到正题,在高斯平滑方法中,也基本上是遵循了这条套路,但它的窗子取的是整个实数集,也就是说,图中的所有点都将参与运算,这样一来就只剩下如何确定权重这个问题了。关于这一点,我们应该会有一种直观的感觉,那就是,离我越近的点,我就应该越相信它,因此这个权重很自然地就会取成是两点横坐标之差的函数,而且它应该有两条性质:一是应该关于y轴对称,即在我左边和在我右边是同等待遇;二是离我越远,其权重就应该越小,即满足“亲疏原则”。很显然,正态分布的密度函数就满足这两个条件。以标准正态分布的密度函数φ(x)为例,假设有三个点,离我的距离分别是1,2和3,那么它们权利的大小就分别是φ(1)=0.242,φ(2)=0.054和φ(3)=0.004,相应的权重分别为0.242/(0.242+0.054+0.004)=0.807,0.054/0.3=0.18和0.004/0.3=0.013。我们知道正态分布有两个参数,μ和σ^2,根据前面的对称性原则,μ必须要为0,而σ则可以根据实际情况来变化。一般来说,σ越大,密度曲线就越平坦,等权的倾向也就越大。下面的公式是估计值的表达式,其中的K(,)就是核函数,相当于是不同点“决定权”大小的度量,图中的三条曲线是三种不同的核。
让人感到惊奇的是,这种平滑技术在视觉上的效果就是图像的模糊变化。电脑屏幕上所看到的图像都是由像素点构成的,而颜色则是由一个三维向量(R, G, B)来表示,其中三个分量分别代表了红色、绿色和蓝色的亮度。简单一点,如果只考虑黑白色系,那么颜色就由其“黑的程度”来表达,定义黑为0,白为1,于是任何一种灰色都可以对应到(0, 1)之中的一个实数。想像一下,电脑上的一幅黑白照片其实可以看作是三维空间中的一幅散点图,x轴和y轴分别对应了某个像素点在电脑屏幕上的水平和垂直坐标,z轴则是这个像素点颜色的深浅。要对这幅三维散点图进行平滑,步骤完全一样,只是这时决定权重的函数变成了二元正态分布的密度函数。一般来说,其中的ρ参数都会取成0,即两个分量是相互独立的,而两个方向上的σ则是所谓的X方向和Y方向上的模糊半径。
前面说到,用正态分布来进行平滑,所有的点都要参与运算,这在实际操作中运算量是相当大的。但我们知道,正态密度曲线衰减的速度是比较快的,3σ之后与0相差无几,因此在计算时可以人为地划定一个框(比如3×3或5×5等),只对框内的点进行加权。下面就给出一段R语言程序,用来在R中实现高斯模糊的效果。需要说明的是,这段程序只适用于灰度的jpg或jpeg图片,而且算法没有经过优化,速度可能会非常慢。rimage包和示例图片到这里下载。
#生成“框”中各个元素的权重,grid是框的边长。
gaussm = function(grid, sigma) {
m = outer(1:grid, 1:grid, function(x, y) dnorm(x - (grid +
1)/2, 0, sigma) * dnorm(y - (grid + 1)/2, 0, sigma))
return(m/sum(m))
}
#加载rimage包。
library(rimage)
#指定框的边长和sigma的取值。
grid = 5
sigma = 3
#生成框。
m = gaussm(grid, sigma)
#读取图片,这段程序中需要灰度的jpg或jpeg图片。
pic = read.jpeg("demo.jpg")
#把图片转成像素矩阵。
picm = pic[, ]
newm = picm
r = (grid - 1)/2
#对像素点逐一进行转换,为了简便起见没有包括图片边缘上的点。
for (i in (r + 1):(ncol(picm) - r)) {
for (j in (r + 1):(nrow(picm) - r)) {
newm[j, i] = sum(picm[(j - r):(j + r), (i - r):(i + r)] *
m)
}
}
#画出原来的图片。
plot(pic)
#新开一个窗口,画出高斯模糊后的图片。
x11()
plot(imagematrix(newm))
更新后的代码,速度应该更快,而且支持彩色图片,可以更换核函数(参数kernelf),感谢Linlin Yan:
blur<-function(x,grid,kernelf,...)
{
if(grid<3) stop("grid should be great than or equal to 3!");
if(grid%%2==0) stop("grid should be odd number!");
v=sapply(1:grid-(grid+1)/2,kernelf,...);
v<-v/sum(v);
r<-(grid-1)/2;
newx<-tmp<-x;
is.grey<-length(dim(x))<3;
for(i in (r+1):(nrow(x)-r))
{
if(is.grey)
{
tmp[i,]<-colSums(x[(i-r):(i+r),]*v);
}else{
for(k in 1:3)
{
tmp[i,,k]<-colSums(x[(i-r):(i+r),,k]*v);
}
}
}
for(j in (r+1):(ncol(x)-r))
{
if(is.grey)
{
newx[,j]<-colSums(t(tmp[,(j-r):(j+r)])*v);
}else{
for(k in 1:3)
{
newx[,j,k]<-colSums(t(tmp[,(j-r):(j+r),k])*v);
}
}
}
return(newx);
}
kernel.gauss<-function(x,sigma) dnorm(x,0,sigma);
blur.gauss<-function(x,grid,sigma) blur(x,grid,kernel.gauss,sigma=sigma);
library(rimage);
a=read.jpeg("demo.jpg");
m=blur.gauss(a,5,3);
plot(imagematrix(m));